![]()
日本語
English
![]()
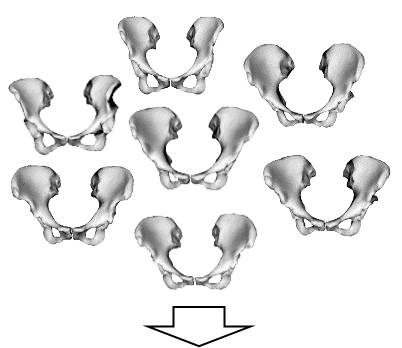
統計形状モデルは、過去に撮影されたたくさんの患者さんの医用画像データ(CT等)に対して統計解析(主成分分析等)を行い、各患者間で異なる多様な臓器形状を、平均形状と少数の変形成分(主成分)パラメータにより表現するためのモデルです。これによって、複雑な臓器形状(例えば骨盤)を少ない数の変数(例えば10-30)だけで表現する事ができるようになります。我々はこのモデルを使って、より高精度かつ安定に画像セグメンテーションを行うアルゴリズムを研究しています。
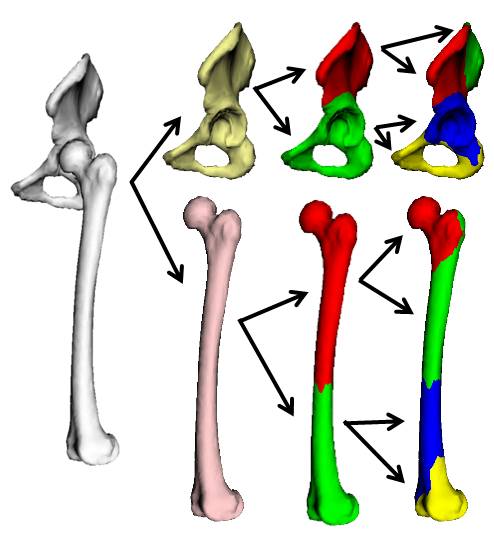
統計形状モデルは、多様な形状を少ない数のパラメータで表現する事ができるメリットがありますが、一つの臓器の中に患者間のばらつきの多い部分と少ない部分がある場合、誤差が大きくなってしまうという問題があります。我々は、この問題に対処するため、人体の一つあるいは複数の臓器を複数の部分メッシュから成る階層的な構造として考え、それぞれの部分メッシュに対して統計モデルを構築する階層的統計モデルの研究をしています。
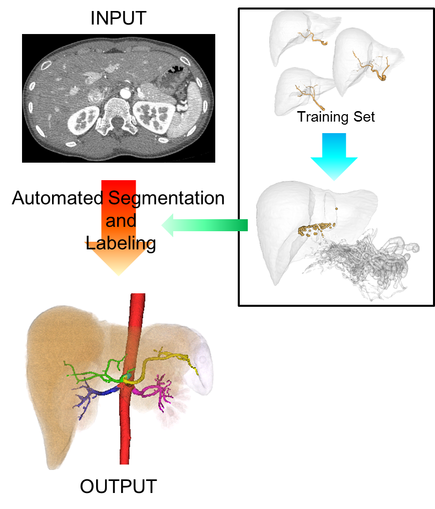
腹部血管構造の理解は術前診断,治療計画,術中ナビゲーション等において非常に重要な役割を持ちます.血管構造の理解に役立つ血管構造自動認識(血管抽出と解剖学的名前対応付け)についての研究です.複雑な三次元構造を持ち患者間のばらつきの大きい血管をうまく認識するための手法を開発しています. Yuki Suzuki, Toshiyuki Okada, Masatoshi Hori, Futoshi Yokota, Marius George Linguraru, Noriyuki Tomiyama, Yoshinobu Sato, “Automated Segmentation and Anatomical Labeling of Abdominal Arteries Based on Multi-organ Segmentation from Contrast-Enhanced CT Data,” MICCAI 2012, Workshop on Clinical Image-based Procedures: From Planning to Intervention, LNSC, Vol. 7761, pp. 67-74 2013
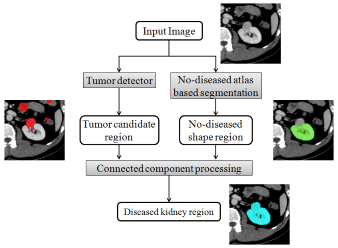
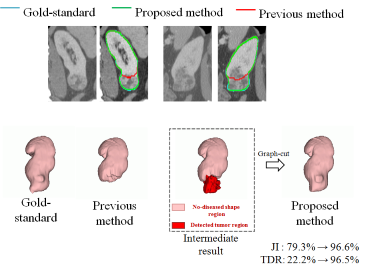
本研究ではCT画像から特に疾患を持つ腎臓を自動抽出する手法を提案する.これまでCT画像からの腎臓領域の自動抽出はいくつか提案されてきたが,特に疾患を持つ腎臓を対象とした物ではなかった.疾患を持つ腎臓の自動抽出は診断・治療支援に重要である.腎臓の腫瘍は発生位置と大きさのバリエーションが大きく,統計アトラス的な手法は向かない.そこで,腫瘍の検出には機械学習により腫瘍の画像特徴を学習した検出器を用い,統計アトラスに基づく正常な形状の腎臓領域抽出と組み合わせて疾患腎臓全体領域の自動抽出を行う.実験では40症例79腎臓を用いて評価を行い,Jaccard indexにおいて全腎臓平均ではおよそ4ポイントの向上,罹患腎臓のみでは約7ポイントの向上が見られた.実験結果より,提案法は腫瘍領域全体の抽出法としては一定の成果を示していると考えられる. 福田紀生, 中本将彦, 岡田俊之, 小路直, 浮村理, GILL Inderbir S., 堀雅敏, 富山憲幸, 佐藤嘉伸, "腫瘍を有する腎臓の造影CT画像からの自動セグメンテーション", 第32回日本医用画像工学会大会, 東京, 2013年 7月.
Under construction.
Under construction.
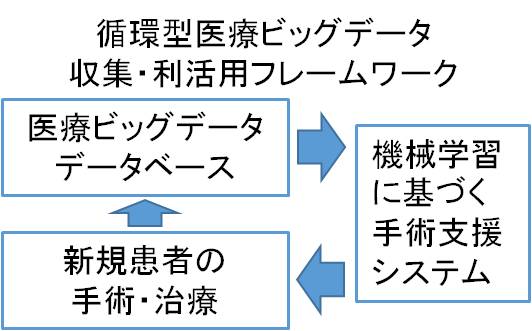
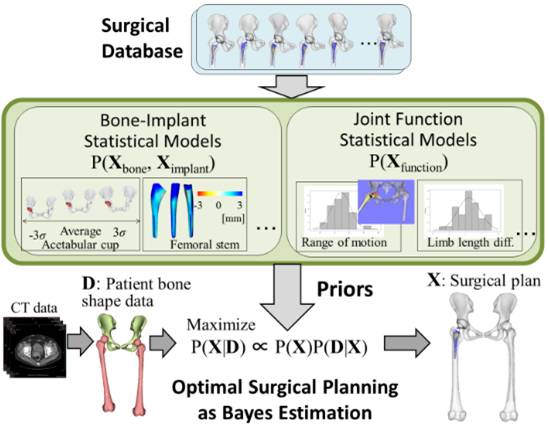
CTやMRIなどの医用画像データや術者が術前に作成した手術計画、術後経過の評価などといったデータは、通常手術や治療が終わると病院のデータベースに格納され、再利用される事はほとんどありません。我々の研究室ではこの、各病院に眠る膨大な医療データ(医療ビッグデータ)を有効に活用するための一つの方法として、医療ビッグデータからの統計学習で得られた情報を、手術の支援のために応用するシステムを研究しています(本システムの詳細は「手術支援システム」の項参照)。患者・医師双方に便益をもたらす本システムにより、医療ビッグデータの重要性が広く社会に認識される事で、より多くのデータ収集が可能になります。また、学習データの増加はシステムの性能向上に寄与する、データ収集と手術の安全性向上の相乗効果をもたらす循環型フレームワークが構築できます。 科学技術振興機構戦略的創造研究推進事業「さきがけ」(研究領域:ビッグデータ統合利活用のための次世代基盤技術の創出・体系化) プロジェクト名:統計学習と生体シミュレーションを融合した循環型手術支援
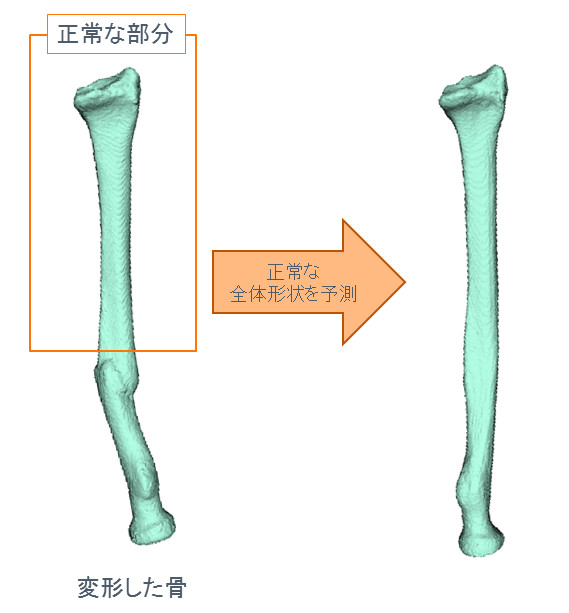
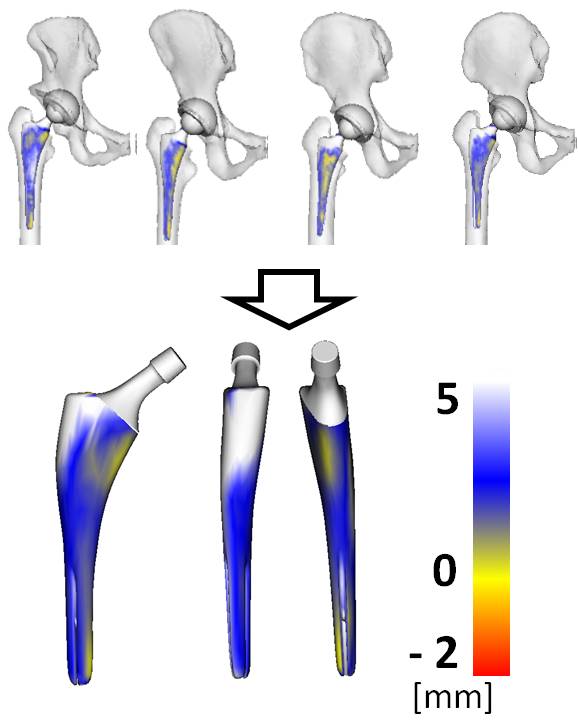
三次元CT画像を用いて健常な反対側を目標に変形矯正を行う手法は普及しつつありますが、両側の変形などには対応できません。そこで、正常な骨形状をあらかじめ統計学習させておき、変形した骨の健常な部分から正常な全体形状を予測し、手術支援に使用しようとしています。
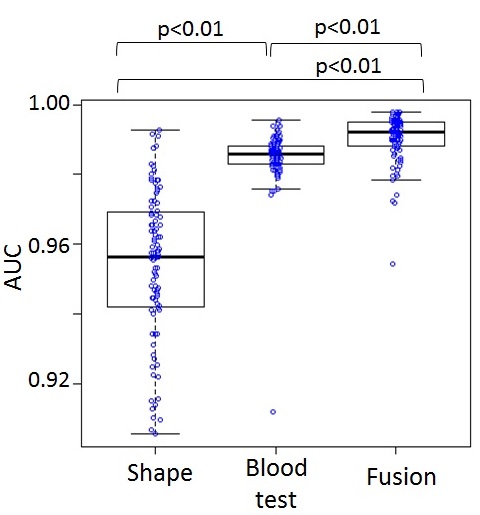
医用画像を用いた診断支援の研究は広く行われてきましたが,今後画像情報を他の医療情報と統合して診断精度向上を図る研究が重要になります.現在,臨床で肝線維化症の確定診断に用いられる肝生検は侵襲的な手法であるため,非襲的な手法が研究されています.先行研究では,血液検査情報やCT画像から得られる肝臓の形態情報など単独の情報から肝線維化症を分類する手法が報告されました.本研究では,検査情報と画像情報の統合による分類精度向上を狙い,血液検査情報と形態情報の統合を目的とします.形態情報と血液検査の項目を組み合わせてサポートベクターマシンを構築し肝線維化症の分類を行いました.3-fold交差検定を100パターンで試行しarea under the ROC curve (ROC)を評価しました.統合によりAUCが改善することを確認しました.しかし,血液検査と形態どちらの情報でも,分類が難しい症例があることも確認しました.今後更にMRIやMRエラストグラフィーから得られるテクスチャ情報や硬さ情報の統合を行い,有無だけでなく線維化ステージの推定を行う予定です. 政木勇人,横田太,大竹義人,堀雅敏,岡田俊之,富山憲幸,佐藤嘉伸,"肝線維化症の診断支援に向けた画像情報と検査情報の統合法の検討 -血液検査情報に基づく診断への形態情報の統合-," 電子情報通信学会技術研究報告,医用画像,Vol.114,pp.59-62,2015年3月
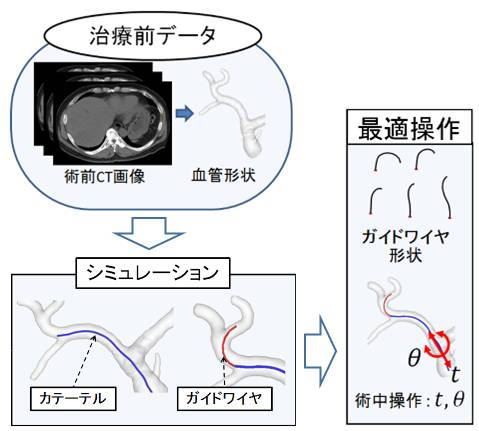
人体内部を撮影した3次元医用画像(CT画像)から得た、患者固有の血管形状を元に、カテーテル手術における操作の最適化を行います。手術で使用する術具の形状を統計的にモデリングし、血管内に術具を通すシミュレーションを行うことで、術中操作の最適化を行います。
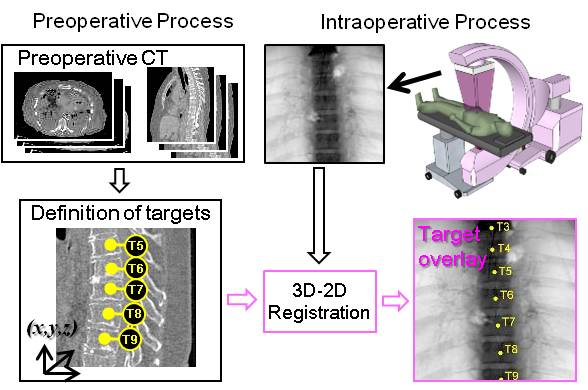
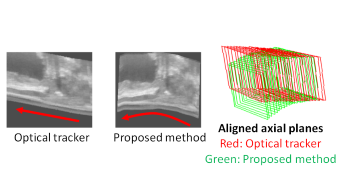
脊椎手術では、手術を始める前に手術対象とする椎体を見つけるためにX線画像を用います。2次元投影像では椎体はどれもとても似ているため、首や骨盤などの特徴のある部分を基準に、対象とする椎体まで順に数える作業(Level countingと呼ばれる)を行いますが、ここでミスが起きることがあり、3000件の脊椎手術に1件は部位取り違い手術(wrong-level surgery)という手術ミスが起きているという報告もあります。私たちは、2D-3Dレジストレーションを用いて、術前にあらかじめ3次元画像上で特定した対象部位の位置情報を術中の2次元投影像に重ね合わせる事で、対象とする椎体を術中に高精度に特定するシステムを研究しています。本システムは2013年のSpine Technology Award(Orthopaedics This Week主催)を受賞しました。 Otake, Y., A. S. Wang, A. Uneri, G. Kleinszig, S. Vogt, N. Aygun, S.-f. L. Lo, J.-P. Wolinsky, Z. L. Gokaslan and J. H. Siewerdsen (2015). "3D–2D registration in mobile radiographs: algorithm development and preliminary clinical evaluation." Physics in Medicine and Biology 60(5): 2075. Otake, Y., A. S. Wang, J. Webster Stayman, A. Uneri, G. Kleinszig, S. Vogt, A. J. Khanna, Z. L. Gokaslan and J. H. Siewerdsen (2013). "Robust 3D-2D image registration: application to spine interventions and vertebral labeling in the presence of anatomical deformation." Phys Med Biol 58(23): 8535-8553. Liu, W., Y. Otake, M. Azizian, O. Wagner, J. Sorger, M. Armand and R. Taylor (2014). "2D–3D radiograph to cone-beam computed tomography (CBCT) registration for C-arm image-guided robotic surgery." International Journal of Computer Assisted Radiology and Surgery: 1-14. Armiger, R. S., Y. Otake, A. S. Iwaskiw, A. C. Wickwire, K. A. Ott, L. M. Voo, M. Armand and A. C. Merkle (2014). Biomechanical Response of Blast Loading to the Head Using 2D-3D Cineradiographic Registration. Mechanics of Biological Systems and Materials, Volume 4. F. Barthelat, P. Zavattieri, C. S. Korach, B. C. Prorok and K. J. Grande-Allen, Springer International Publishing: 127-134.
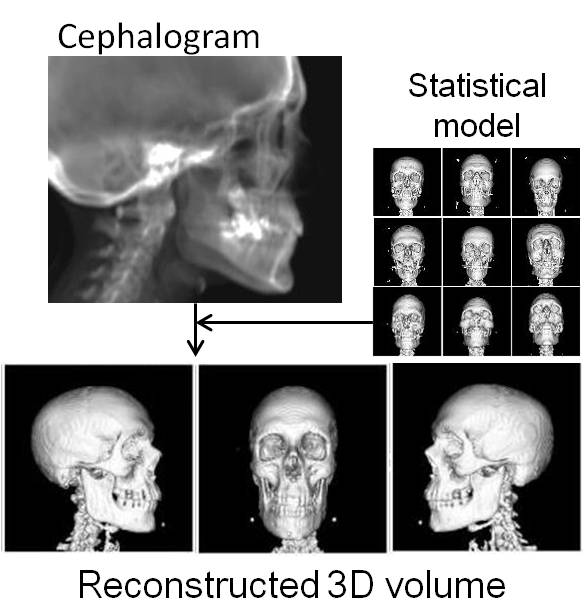
歯科治療における頭部X線規格写真(セファログラム)をはじめとして、X線投影像は疾患程度の評価や、手術の成否の確認など、日常臨床の様々な場面で用いられています。二次元に投影した画像では、対象構造の三次元的な位置関係や形の高精度な計測は困難ですが、熟練した医師はこの二次元画像だけから大まかな三次元構造を思い描く事ができます。これは、過去の多くの患者の骨格形状を知識として持っているためと考えられます。私たちは機械学習を使ってこの熟練医の推定過程を再現し、さらに熟練医を超える精度での三次元再構成を可能とする手法を研究しています。つまり、過去のたくさんの被験者の三次元画像からの統計学習を用いて、一方向(あるいは二方向)のX線投影像から、もっとも確からしい三次元形状を推定します。これにより、低侵襲に計測した二次元画像のみから、高精度な三次元計測が可能となるだけでなく、手術ナビゲーションや術後の動作解析などのさまざまな三次元解析が可能となります。
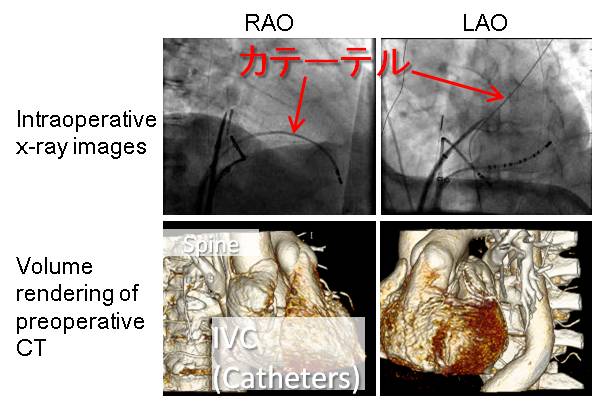
心臓カテーテル手術では、RAO(Right Anterior Oblique)とLAO(Left Anterior Oblique)と呼ばれる二方向からのX線画像を使って、大腿部の付け根から挿入した細いチューブ状のカテーテルを心臓の内腔まで誘導し、拍動する心臓の目的の部位に穴を開けるなどの治療を行います。術者はカテーテルを操作する手元の感触と、画像に写るわずかな心臓辺縁の動き、さらに患者の疾患程度や年齢・性別を考慮してカテーテル先端の心臓に対する三次元位置の推定を行いながら手技を進めていきます。我々は、この非常に困難な手技を支援するため、心臓の動態シミュレーションや統計アトラスから得られる事前知識を最大限に活用する事で、二方向のX線画像から心臓の三次元位置やその動きの情報までを取得できるシステムを目指して研究を行っています。
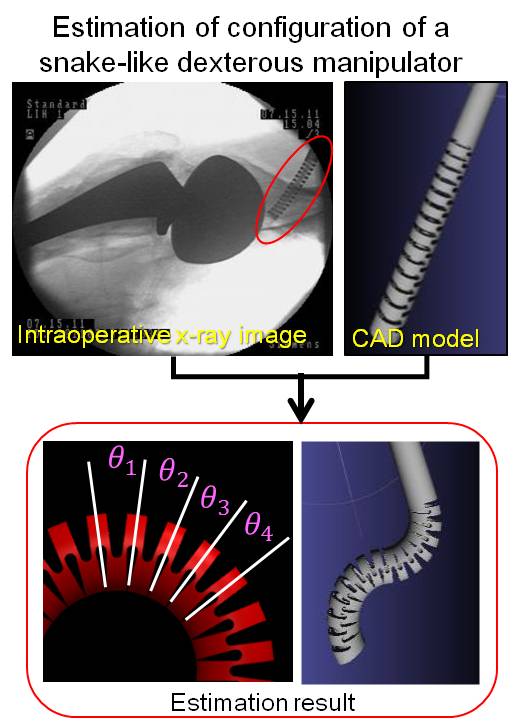
近年、da Vinciなどの手術用ロボットが普及し始めていますが、現在の手術用ロボットでは、患者に触れる先端部分(スレーブ側アーム)に一つの関節しか持たないため、操作可能な対象が限られてしまいます。そこで、Snake型と呼ばれるたくさんの関節を持つロボットアーム(左図)の研究が活発に進められています。動きの自由度が多いため、細い穴を通過した先での手術など、新しい低侵襲手術の開拓も期待されていますが、その反面、外から加えられた力に対して大きく変形してしまうため、ロボットの形態(全ての関節の角度)を高精度に制御する事が難しいという課題があります。そこで、我々はX線投影像を使って術中に、体内のロボットの形態を計測し、これを制御系にフィードバックしてキャリブレーションを繰り返す事で、手術全体を通して高精度な制御を可能にするシステムを開発しています。 Otake, Y., R. J. Murphy, M. D. Kutzer, R. H. Taylor and M. Armand (2014). Piecewise-rigid 2D-3D registration for pose estimation of snake-like manipulator using an intraoperative x-ray projection. Medical Imaging 2014: Image-Guided Procedures, Robotic Interventions, and Modeling, Proc SPIE.
関節鏡手術は手術創が小さく患者の負担が少ないが,視野が狭く術医の負担が大きい. そこで拡張現実感による手術支援のシステムが開発されている. 関節鏡は斜視内視鏡であり,かつ大きな画像歪みを持つため,これまでのカメラモデルでは適切に重畳表示できない. そこで我々は関節鏡に適した新たなカメラモデルを提案した. 従来法では鏡筒の回転角が大きななるほどに,重畳のズレが大きくなったが,提案法では回転角が増加しても重畳誤差はあまり変化がなかった. Norio Fukuda, Masahiko Nakamoto, Toshiyuki Okada, Yen-Wei Chen and Yoshinobu Sato, “Comparison of accuracy on camera calibration method with distortion correction for oblique-viewing endoscope for computer assisted endoscopic surgery,” IEICE Tech. Rep., vol. 109, no. 407, MI2009-91, pp. 87-92, Jan. 2010.
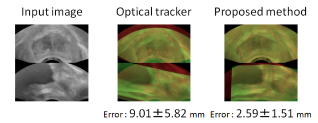
前立腺の局所治療において重要なのは病変部の正確な位置決めであり,生検時の位置の精密な記録,および,病変部への的確な誘導を行うため三次元位置センサを用いて超音波プローブの位置を計測し穿刺を支援するシステムが研究開発されている.しかし,位置センサを用いる場合には導入コストや術前の設置の手間,センサの計測条件による可動範囲の制限といった点で円滑な治療の妨げとなる場合がある.そこで,我々は既存のシステムにおける位置センサでの位置姿勢計測を画像位置合わせによる位置姿勢推定で代替することにより,位置センサを用いない穿刺支援を提案した.提案法は画像位置合わせに基づいているため位置センサだけでは難しい術中の内部組織の移動・変形への追従が期待できる.そこで,患者の実画像に近い画像が撮影できるCadaverを用いた実験を行い,臨床適用の可能性を検討する. Norio Fukuda, Masahiko Nakamoto, Toshiyuki Okada, Yoshito Otake, Sunao Shoji, Japan, Osamu Ukimura, Inderbier S. Gill, USA, Yoshinobu Sato, "Cadaver evaluation of image-based tracking using biplane transrectal ultrasound probe for focal prostate therapy." the 2015 Joint Conference of the International Workshop on Advanced Image Technology (IWAIT) and the International Forum on Medical Imaging in Asia (IFMIA), Tainan, Jan. 2015.
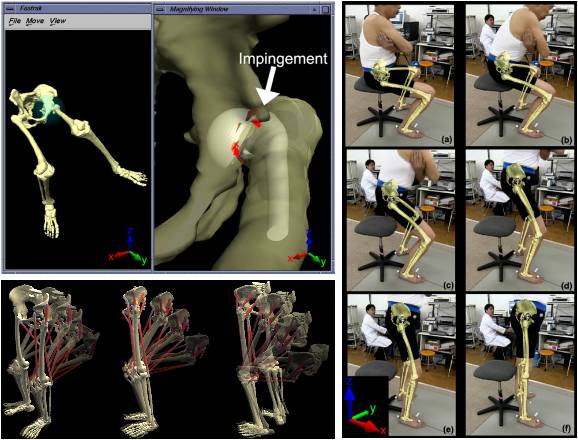
Under construction. Otake, Y., N. Suzuki, A. Hattori, K. Hagio, N. Sugano, K. Yonenobu and T. Ochi (2005). "Four-dimensional model of the lower extremity after total hip arthroplasty." J Biomech 38(12): 2397-2405. Otake, Y., N. Suzuki, A. Hattori, H. Miki, M. Yamamura, K. Yonenobu, T. Ochi and N. Sugano (2007). "System for intraoperative evaluation of soft-tissue-generated forces during total hip arthroplasty by measurement of the pressure distribution in artificial joints." Computer Aided Surgery 12(1): 53-59.
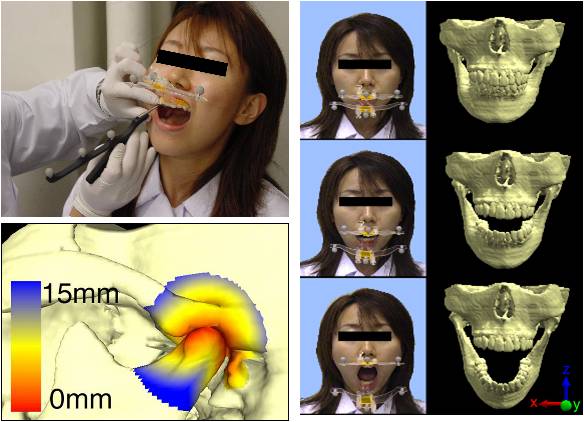
Under construction. Otake, Y., N. Suzuki, A. Hattori, Y. Shigeta, T. Ogawa, S. Fukushima, K. Kobayashi and A. Uchiyama (2006). "Real‐time mandibular movement analysis system using four‐dimensional cranial bone model." Systems and Computers in Japan 37(8): 1-12.